Друзья,
❓А вы когда-нибудь сталкивались с ситуацией, когда нужно настроить регулятор, но модель объекта управления неизвестна? Мы решили эту двойную задачу в одном проекте – сначала идентифицировали объект по экспериментальным данным, а затем применили нечёткий ПИД-регулятор.
❓А вы когда-нибудь сталкивались с ситуацией, когда нужно настроить регулятор, но модель объекта управления неизвестна? Мы решили эту двойную задачу в одном проекте – сначала идентифицировали объект по экспериментальным данным, а затем применили нечёткий ПИД-регулятор.
Знаете, почему это особенно интересно? Мы не просто взяли готовую модель из учебника, а получили её из "живых" экспериментальных данных с шумом и запаздыванием – как это бывает в реальности!
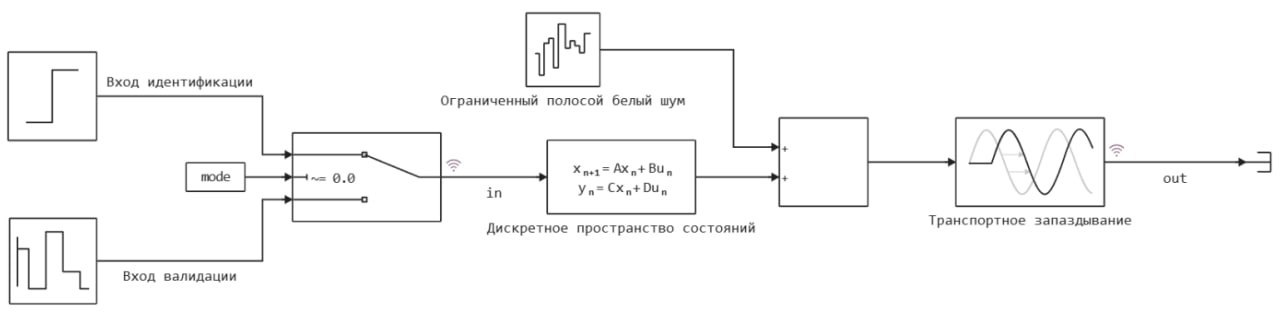
✔️ Умная идентификация: Использовали метод ошибки прогнозирования для получения модели системы. Система "сама рассказала" о своих свойствах через переходный процесс!
🔄 Двойная валидация: Проверили модель не только на обучающих данных, но и на специальном валидационном наборе – и результат превосходный!
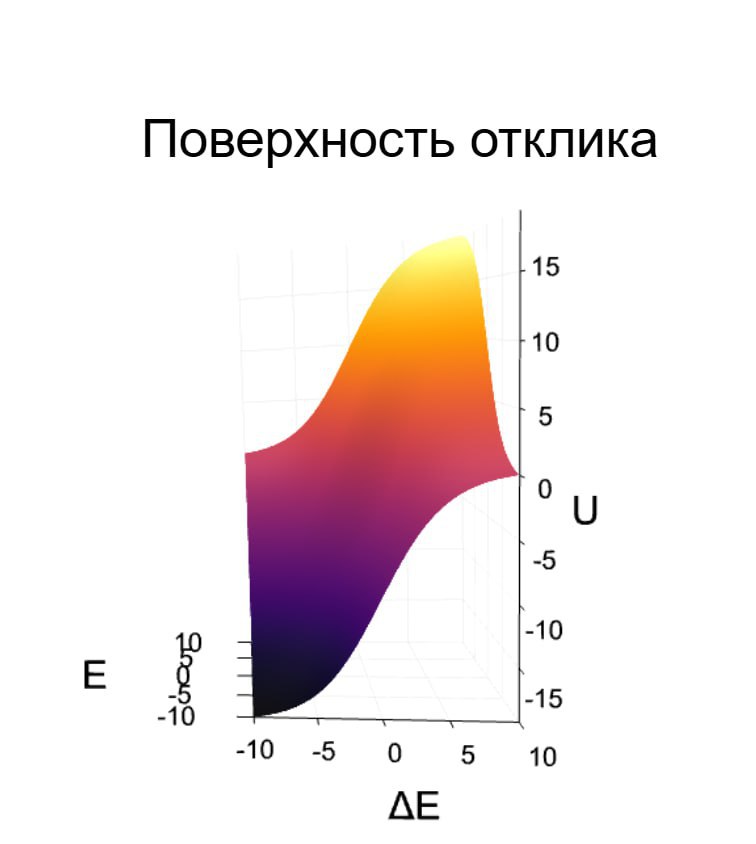
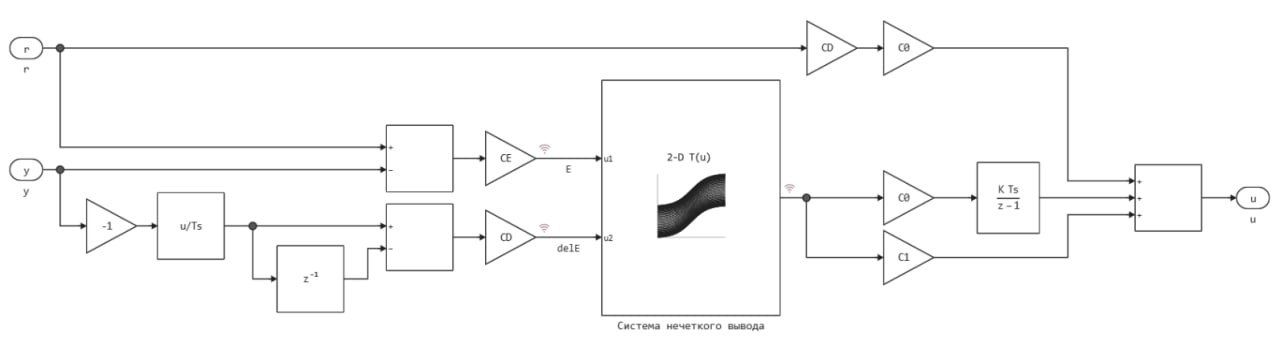
🧠 Нечёткое управление: Заменили классический ПИД на систему с нечёткой логикой. Регулятор принимает решения на основе простых правил типа "если ошибка большая и растёт, то..."
🔧 Единая среда: Вся идентификация и синтез регулятора выполнены в Engee. Никаких переходов между разными программами!
Получилась работающая система управления, где модель объекта была неизвестна заранее, а определена экспериментально. Такой подход очень близок к реальным инженерным задачам!
Как думаете, в каких ещё областях полезна связка "идентификация + нечёткое управление"?
Делитесь идеями в комментариях!