Друзья,
А вы когда-нибудь пробовали реализовать с помощью кода модель двигателя постоянного тока (ДПТ) с возмущающим моментом от нагрузки? А алгоритм управления с помощью линейно-квадратичного регулятора (LQR)? Мы сделали это за вас и в одном (!) скрипте реализовали и то, и другое. Найти этот проект в Сообществе можно ТУТ.
А вы когда-нибудь пробовали реализовать с помощью кода модель двигателя постоянного тока (ДПТ) с возмущающим моментом от нагрузки? А алгоритм управления с помощью линейно-квадратичного регулятора (LQR)? Мы сделали это за вас и в одном (!) скрипте реализовали и то, и другое. Найти этот проект в Сообществе можно ТУТ.
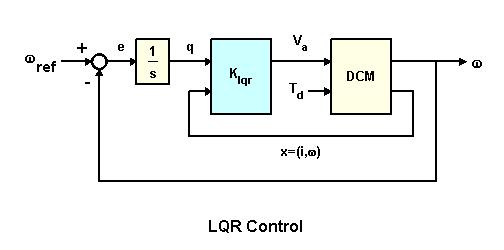
Основой демо-проекта стала модель объекта управления – ДПТ. У этой модели есть особенность – наличие возмущающего момента от нагрузки. То есть модель двигателя имеет несколько входных сигналов. Описание такой системы позволяет выполнить библиотека RobustAndOptimalControl.jl. Сначала мы создали объекты блоков схемы управления с входными и выходными сигналами функцией named_ss, затем установили связь между выходом одного блока и входом другого, задали внешние входные сигналы и выходной сигнал системы. Объединили все объекты с помощью функции connect и получили описание системы с двумя входами и одним выходом в виде пространства состояний.
Второй задачей проекта стало управление описанной моделью. Мы исследовали три способа, среди которых управление с помощью линейно-квадратичного регулятора (LQR). Задавая матрицы весов Q и R, мы синтезировали контроллер, используя библиотеку ControlSystems.jl. Затем подключили LQR к модели двигателя и перешли к замкнутой системе управления, чтобы построить выходной сигнал и анализировать эффективность данного способа управления.
Расчетная среда Engee – очень современный и гибкий инструмент, который позволяет реализовывать самые разнообразные инженерные задачи любой сложности.
Приглашаем попробовать и вас! Активируйте бесплатную лицензию Engee и делитесь своими идеями здесь или в Сообществе. А мы вам обязательно поможем. ⚡
До скорой связи!